Lejearrangement - Rapporten - Styrkelære - Akselberegning - Tolerancer - Materialelære - Robot - Gokartberegning - Pladeklip
Robot-køretøj
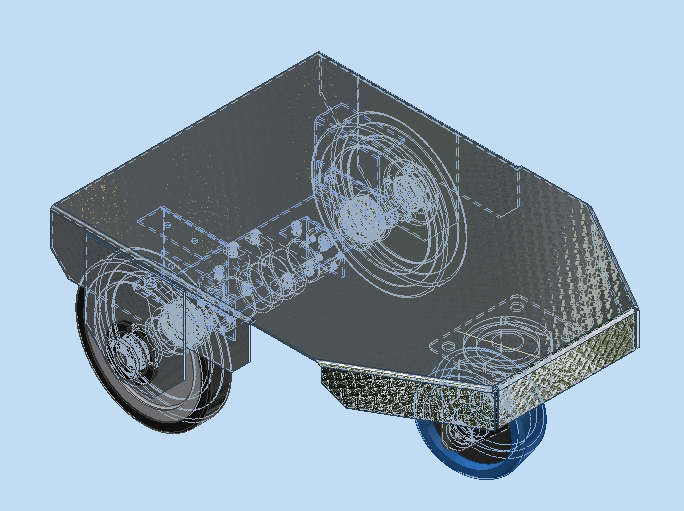
Ideer til fremstilling af robotkøretøj. Forsynes med 2 stk DC motorer 12V og styres vha. arduino. Chassis og monteringsplader kan godt være aluminiumplade, fx. dørkplade eller 2 mm plade. Så skal de forskellige dele skrues (eller nittes) sammen. På tegningen mangler et (to?) forhjul, der skal være 360 grader roterende hjul.
En del af emnerne kan med fordel være 3D printede fx lejedæksel og holder til motor. Der skal konstrueres en medbringer-mekanisme så hjulet drejer rundt sammen med akslen.
Hvis hjulene er ca. 150 mm i diameter og motoren kører med 200 rpm kan hastigheden af køretøjet beregnes.
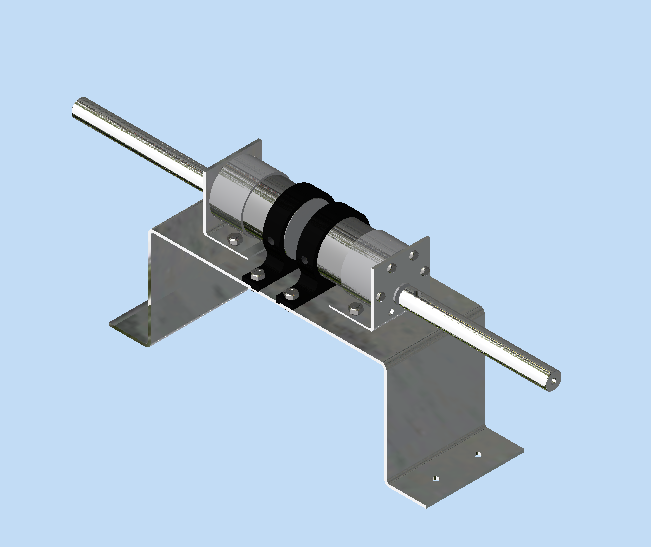
Et forslag til montering af motor, og fast stå-leje. Motoraksel kan fx være ø12 mm, og kuglelejer SKF6001-2Z.
Der er vist ovenfor monteret udvendig på chassis i et lejehus.
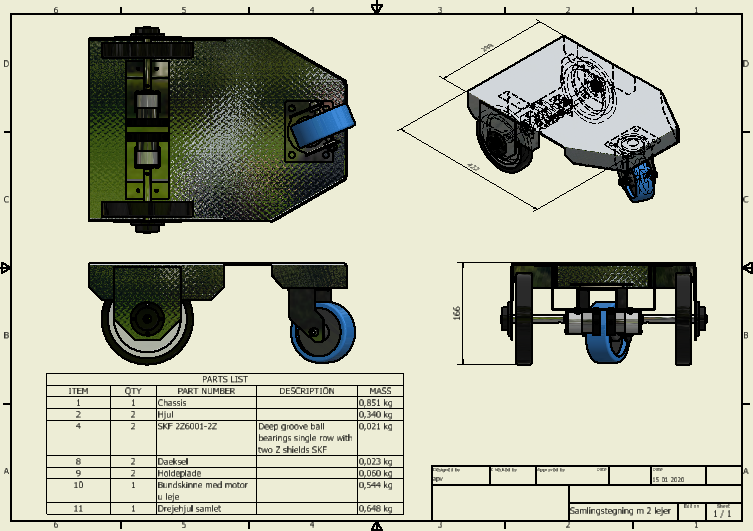
Hent evt. nogle tegninger her (Inventor 2018): Holdeplade, dæksel, medbringer. Evt. også motor (12v DC) og hjul.
Vejledende skitse og ca. mål. Dette er blot et udkast. Der skal indbygges en plads under køretøjet til styring, batteri mm. Kan ligge i en plastboks, der placeres under vognen.
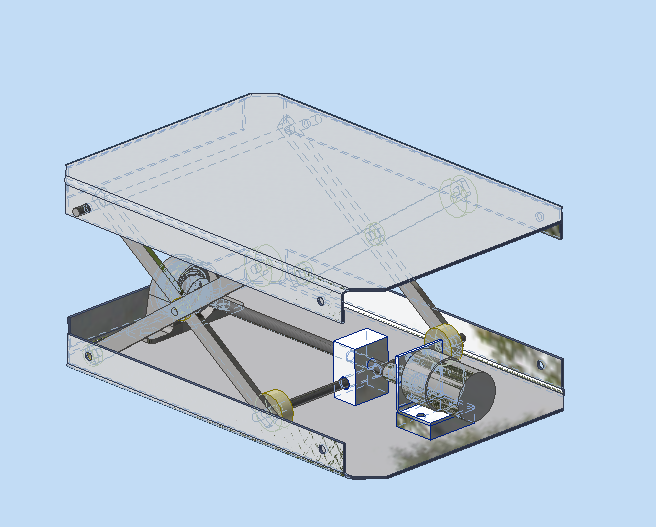
Vognen kan forsynes med en løfte-mekanisme, fx efter saks-lift princippet. Så køretøjet kan medbringe og levere varer.
Se fx herunder en skitse til løfte-mekanisme. Kan passende fremstilles i alu-plader og med en dc-motor med spindel, til at bevæge løftebordet. Løftebordet er ca. 200 mm bredt og 300 mm langt. Løftehøjde ca. 60 mm.
Hvordan kan chassis laves? Ja her er en ide, fremstillet i alu-plade.
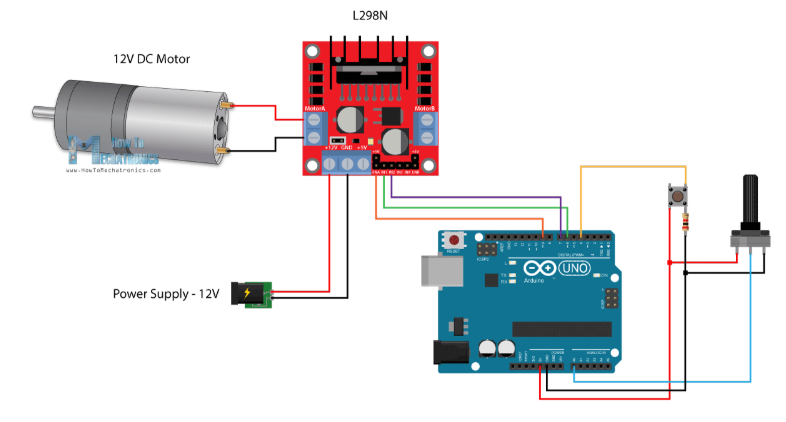
Styring og arduino kan fx fremstilles efter denne metode. https://howtomechatronics.com/tutorials/arduino/arduino-dc-motor-control-tutorial-l298n-pwm-h-bridge/ Se også herunder.
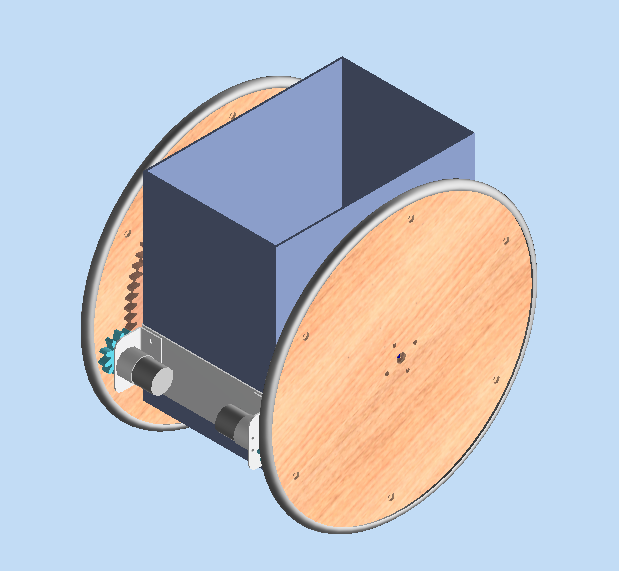
Alternativt forslag til køretøj. En selvkørende affaldsspand, som kan køre rundt så folk kan smide affald i beholderen (?).
Der skal designes en kraftoverførsel, fx remtræk eller et tandhjul der skæres ud på laserskærer.